El Controlador para velero eléctrico
Los controladores Sevcon Gen4 están diseñados para gobernar motores de inducción de CA trifásicos y de imán permanente
Motores de CA (PMAC) en aplicaciones de bombas y tracción alimentadas por batería.
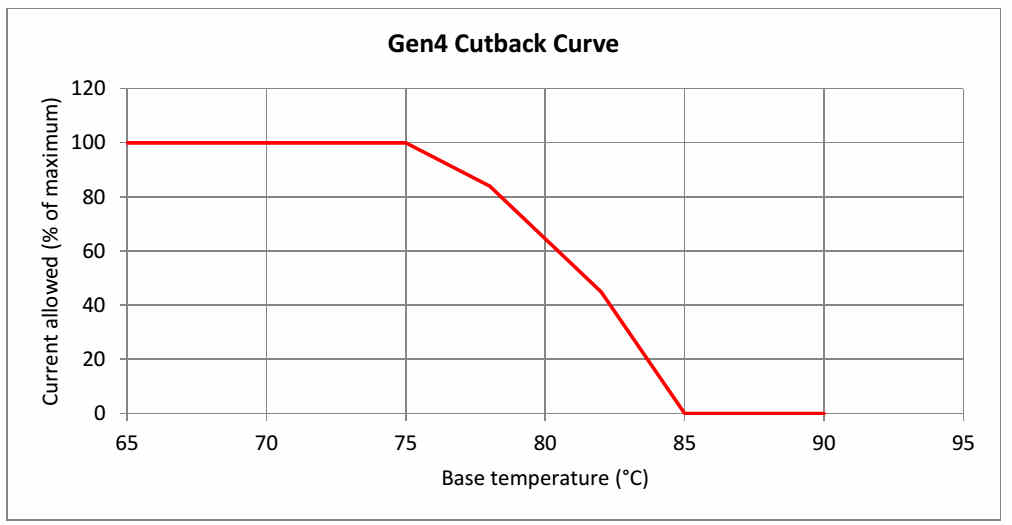
El controlador Sevcon Gen4 adapta su corriente de salida para adaptarse a las condiciones de carga y al ambiente en el que se encuentra en funcionamiento (incluso apagándose temporalmente si es necesario). También está auto-protegido ante un fallo en el conexionado del cableado. Con él controlaremos el motor de nuestro velero eléctrico
Descripción funcional
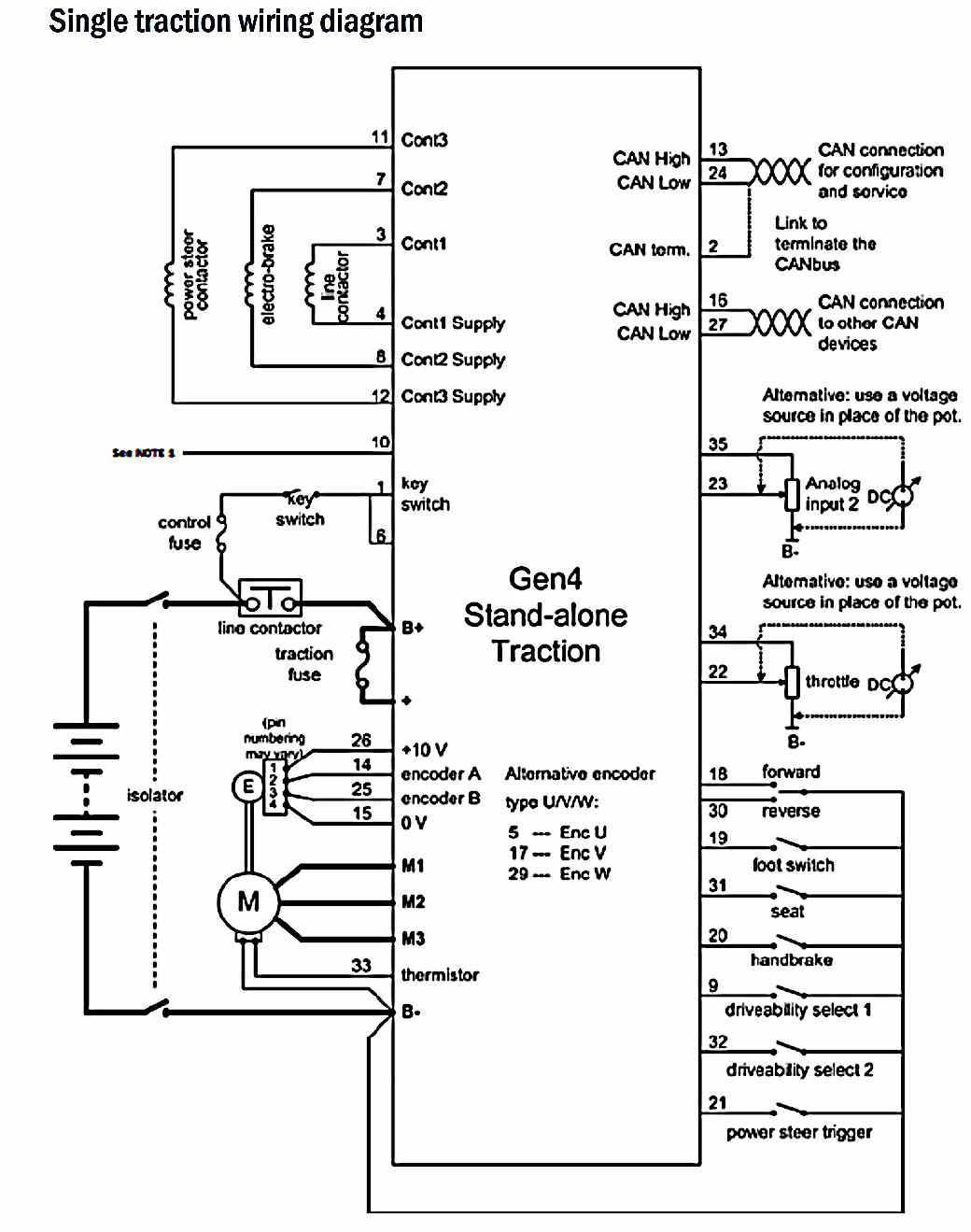
La función principal del controlador es administrar la potencia que enviamos al motor de propulsión eléctrico de nuestro velero. Se permite el control en los cuatro cuadrantes, tanto del par como de la velocidad del motor (par de giro y frenado en las direcciones de avance y retroceso) sin la necesidad de contactores direccionales.
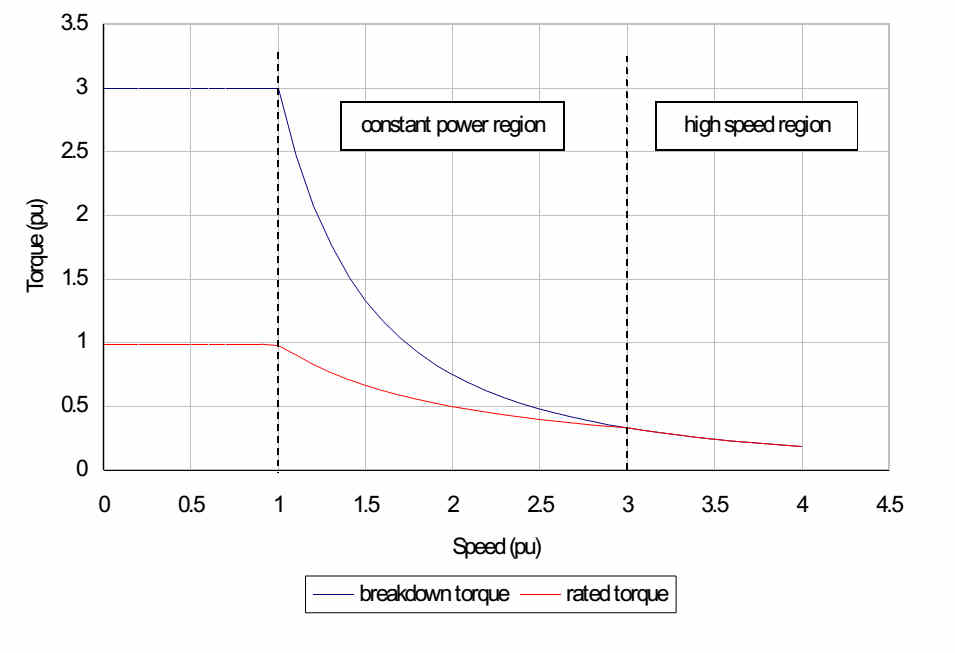
Las entradas del acelerador se pueden configurar como demandas de velocidad o par con límites de velocidad dependientes del acelerador: en cualquier caso, una demanda de par se calcula continuamente para tener en cuenta los límites preestablecidos en el nivel y la tasa de cambio de par. La demanda de par se utiliza para calcular las demandas de corriente; es decir, el controlador calcula qué corrientes se requerirán dentro del motor para generar el par requerido.